Perhaps you have seen this iconic photograph, taken by Apollo 8 astronaut William Anders in 1968:

It is an arresting view: our Earth, seen from the outside. But not just from afar: from another place in space. The lunar landscape gives it a certain awe-inspiring context. How small our Earth looks against the vast stretch of the lunar horizon!
Yet despite its beauty, this photo has irritated me for some time. It is titled Earthrise, a poetic and yet almost entirely misleading name.
How many people have seen this photo and come away thinking that the Earth rises on the Moon?
How many still think that?
The Earth was not rising. The Moon is tidally locked with the Earth, which means that it always points the same face at the Earth. From the Moon’s perspective, the Earth would hang at a fixed point in the sky, depending where you stood on the Moon’s surface. (From the far side, you would never see it.)
However, the astronauts were not standing on the surface but instead in orbit around the Moon, so from their perspective, the Earth came shooting up over the horizon, an artificial Earthrise.
BUT WAIT!
That’s not quite right. Today I learned that the Earth isn’t entirely stationary in the lunar sky, because it (the Moon) librates (wobbles) a little bit back and forth, which makes the Earth appear to move slowly, subtly in the sky, over the course of a month. Perhaps more interesting to the observer is the fact that, from the Moon, the Earth goes through phases (as shown above).
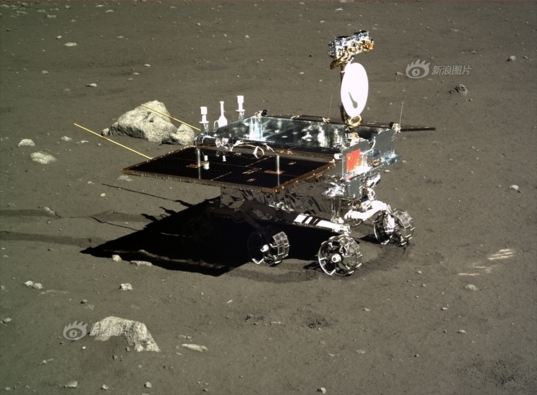
China’s Yutu rover recently captured its own “Earthrise” shot, which includes the lander, and the Earth in a different phase:

Orbital geometry aside, these photos are just breathtaking. And the idea of our blue planet rising, sailing overhead, and then setting is such a dramatic and captivating one! But not reality. As you now know.