Power to the rovers
January 22nd, 2014 at 9:50 pm (Planets, Spacecraft)
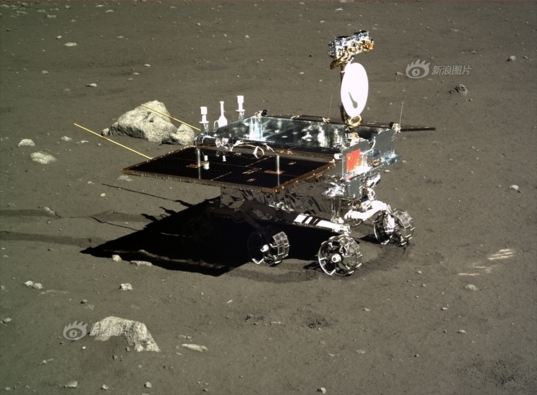 China’s Chang’e 3 mission means that we (humanity) once again have an active rover on the Moon, Yutu. It’s been a while since the Russian Lunokhod 1 (1970-73) and the Apollo LRVs (1971-72) were roving around on the surface!
China’s Chang’e 3 mission means that we (humanity) once again have an active rover on the Moon, Yutu. It’s been a while since the Russian Lunokhod 1 (1970-73) and the Apollo LRVs (1971-72) were roving around on the surface!
And now we have some beautiful pictures from the Chang’e 3 lander and Yutu, which pointed their cameras respectively at each other. Delightful!
The Yutu rover is subject to some interesting operational constraints. It is powered by solar panels, which means that it can operate during the lunar day, but not the lunar night. Each of these lasts for two Earth weeks, so the rover operates for two weeks and then hibernates for the next two. It landed on December 14, 2013, and operated until December 25. It hibernated until January 11 and then woke up to resume operations. In a few more days, the sun will set and it will again go into hibernation. During the long, cold night, it relies on radioisotope heater units to keep it sufficiently warm for the wakeup to work.
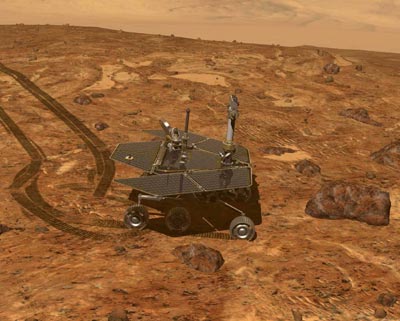
 In contrast, the Mars Exploration Rover Opportunity, which is also solar-powered, operates on a different timescale. It enters deep sleep each Martian night and wakes up each Martian morning, but the Martian day (sol) is much closer to an Earth day: 24 hours, 40 minutes long. This sleep is, indeed, deep: the rover disconnects its batteries from its Power Distribution Unit so nothing can draw any power. In the morning, sunshine on the solar panels causes the rover to reconnect its batteries and start running again. This mode of operation wasn’t part of the original plan; it was implemented after the rover’s first 100 sols when a stuck-on heater threatened to drain the rover of all battery power overnight. Forcibly disabling the heater by disconnecting the battery every night has kept the rover going for an additional 3450 (!) sols (to date).
In contrast, the Mars Exploration Rover Opportunity, which is also solar-powered, operates on a different timescale. It enters deep sleep each Martian night and wakes up each Martian morning, but the Martian day (sol) is much closer to an Earth day: 24 hours, 40 minutes long. This sleep is, indeed, deep: the rover disconnects its batteries from its Power Distribution Unit so nothing can draw any power. In the morning, sunshine on the solar panels causes the rover to reconnect its batteries and start running again. This mode of operation wasn’t part of the original plan; it was implemented after the rover’s first 100 sols when a stuck-on heater threatened to drain the rover of all battery power overnight. Forcibly disabling the heater by disconnecting the battery every night has kept the rover going for an additional 3450 (!) sols (to date).
 The Mars Science Laboratory rover (Curiosity) has no solar panels and therefore, in theory, can operate at any time. In fact, it has done some nighttime surface imaging because it is unaffected by the position of the sun (and shadows) at night. It has also done some stargazing and collected images of the two moons of Mars at night. However, the rover has no headlights, so night driving would be risky; to my knowledge, it hasn’t been attempted. And nighttime operations require that more energy go into the heaters to keep the electronics warm enough, so they’re more costly from a power perspective. Still, it must be nice to be free of a forced hibernation. For maximum flexibility: carry your own power source!
The Mars Science Laboratory rover (Curiosity) has no solar panels and therefore, in theory, can operate at any time. In fact, it has done some nighttime surface imaging because it is unaffected by the position of the sun (and shadows) at night. It has also done some stargazing and collected images of the two moons of Mars at night. However, the rover has no headlights, so night driving would be risky; to my knowledge, it hasn’t been attempted. And nighttime operations require that more energy go into the heaters to keep the electronics warm enough, so they’re more costly from a power perspective. Still, it must be nice to be free of a forced hibernation. For maximum flexibility: carry your own power source!
 I recently joined the Mars Exploration Rover team as a TAP/SIE (Tactical Activity Planner / Sequence Integration Engineer) for the Opportunity rover. That means it’s my job to sit in on the morning SOWG (Science Operations Working Group) meeting, in which the rover’s scientific goals for the day are set, and then work with payload, thermal, downlink, mobility, and other experts to come up with a plan to achieve those goals. What pictures will we take? When? Where will we drive? Is there enough power?
I recently joined the Mars Exploration Rover team as a TAP/SIE (Tactical Activity Planner / Sequence Integration Engineer) for the Opportunity rover. That means it’s my job to sit in on the morning SOWG (Science Operations Working Group) meeting, in which the rover’s scientific goals for the day are set, and then work with payload, thermal, downlink, mobility, and other experts to come up with a plan to achieve those goals. What pictures will we take? When? Where will we drive? Is there enough power?

