Our last day at MDRS dawned rather solemnly, with everyone up by 8, packing and tidying, but feeling a bit at loose ends. Would we have our regular morning meeting? Or had our routine already evaporated? Eventually we all did sit down for breakfast together, which felt comfortingly normal, and then we strategized about the day’s plan. We expected Crew 90 to arrive around noon, and we were determined to be ready with a warm welcome, hot meal, and an empty Hab ready for them to move in.

Radio Ridge behind the Hab
We made great progress, with all of our bags outside on a pallet by 10:30 a.m., and we then moved on to our last reporting and organization tasks. I burned DVDs of all the photos and documents we’d generated during our mission (8 GB of photos plus 8 GB of videos). We sat down to lunch, anticipating that actually eating with Crew 90 would be impossible (the concept of 12 people dining together in our Hab just boggled the mind). And then the wait began. Noon passed… 1 p.m. passed… 2 p.m. passed… and no sign of Crew 90. We all dealt with the delay in our own ways. Darrel and I hiked up onto Radio Ridge, savoring the sweeping vistas and the freedom to walk, hike, stoop, examine rocks, and otherwise explore entirely unencumbered. Mike and Luis took the ATVs out for a last wild ride, without bulky backpacks and limited visibility. Carla stood on the Hab’s doorstep, ready and ready and long-past ready for their arrival. Brian remained indoors compiling our mission’s summary report from the individual inputs we’d previously prepared. Eventually, though, we were all outside, standing in those last moments of silence, straining our ears for any sign of the new crew.

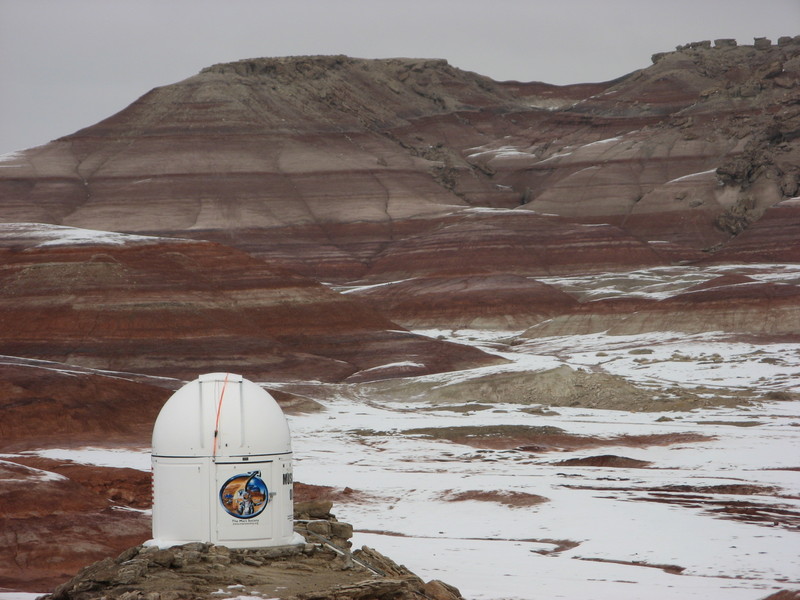
Musk Observatory before Olympus Mons
When they did arrive, at 2:45 p.m., they broke into our world with a bang. We watched as not one, not two, but three vehicles pulled up in front of the Hab. Crew 90 is the first all-Belgian MDRS crew, and they brought with them a serious media presence. They had two reporters and two videographers, who are staying until Tuesday in Hanksville to document their settling in and initial activities in the Hab. With no advance warning of the media onslaught, we were a little taken aback as we tried to encourage the crew into the Hab so that they could sit down for a meal and we could begin our handover briefing. To their credit, the first words Crew 90 offered us were apologies for their late arrival. But cramming sixteen people into the Hab was almost an unbearable contrast with our comfortable six-person patterns, and the noise level was entirely overwhelming. Darrel and Luis were snagged by reporters and pulled off to the side, while Brian and Carla tried to organize the new crew at the table. I felt tongue-tied and hung back in the work area with Mike.

Lowell Highway, now Lowell River
After a general overview, we split into two groups. Mike, Luis, and I showed three of the new crew around the downstairs lab area, the toilet and shower, how to suit up for EVAs, and how to start and operate the ATVs. Darrel, Carla, and Brian took the others on engineering rounds. This went quite smoothly, although it was difficult to determine how much was really conveyed; we got the sense that they did not all have the same level of English fluency.
Time was ticking away, and Brian needed to get back to Hanksville to drop off his seismic equipment for mailing back to Exploration Instruments. Still, we waited patiently while Darrel took the time to give the new crew a thorough grounding in the critical engineering systems that would keep the Hab operational during their stay. We all know just how valuable that orientation and training would be, so we did not begrudge the extra time. But neither did we restrain our gleeful shouts and cheers when we finally pulled away from the Hab, just after 5 p.m.!

Crews 89 and 90
So many choices, Mike!
We made it to our hotel in Grand Junction by 8 p.m. Although we were all eagerly anticipating our first meal back in civilization, we took the time for some quick showers (we’re all experts at fast showers now) just to savor the feel of getting properly clean and being able to use real shampoo (and conditioner! Oh, the luxury). Then we headed for the
Rockslide Brewery and had a hands-down fantastic meal. We couldn’t get over the fact that we had such a vast array of choices, and there were fresh salads, and we could each have different meals! There was fresh sourdough bread (not U.S.-Army-developed
shelf-stable bread), with actual butter (not
ghee), and my salad had fresh cucumbers! Luis and Darrel had steak, and we goggled at the asparagus and carrots that came with it. The mashed potatoes were simply heavenly—buttery, sweet, full of savory taste. I had a portobello mushroom pasta dish with sundried tomatoes, olives, and pine nuts. The rest of the crew enjoyed some beer samplers (
Mike had turned 21 during our mission). We finished up with actual ice cream (!) plus cake for Mike. I’m sure the waitstaff were entertained by our exclamations of delight and utter enjoyment of the food they served. Best of all: we didn’t do any of the cooking, and none of us (especially Carla) washed any dishes!
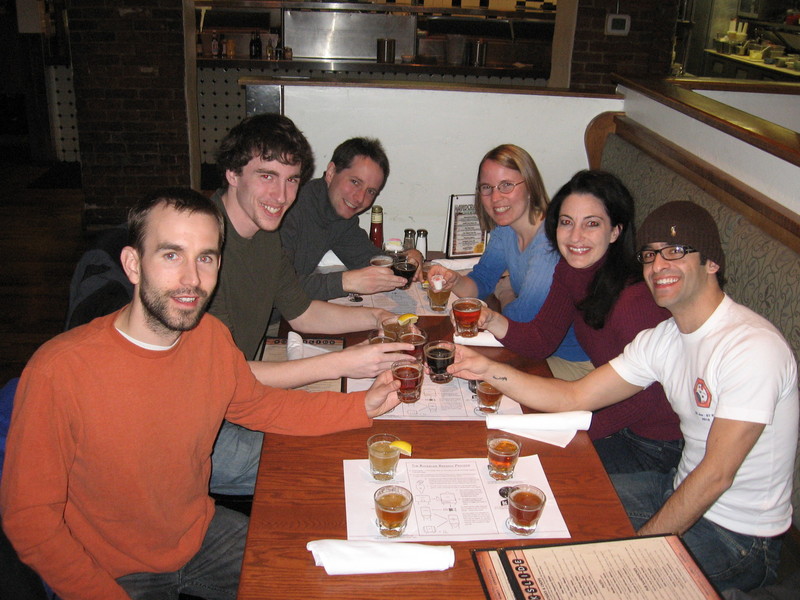
Dinner at the Rockslide Brewery
Back at the hotel, we gathered in one room to learn more about Crew 90’s background, and to see what they were up to through the webcams. It was surprisingly disorienting to see utter strangers moving about in “our” Hab: a combination of displacement and anxious protectiveness for the Hab. Will they manage to keep everything running? Was our handover comprehensive enough? Will they stop leaving the downstairs engineering light on all night? I’m sure we’ll all be checking in with their activities and reports over the next two weeks. As part of the handoff procedure, we should all be subscribed to the MDRS Hab mailing list, able to answer questions and offer tips, just as Crew 88 did for us.
I think we’re all struggling a little already with our re-integration into “Earth†life. It is difficult to follow some conversations from strangers—that is, anyone not in our crew. They seem concerned with things that have faded in importance, like currency (we have to pay for things?) and cars and jobs and Facebook and Superbowls. They don’t get our jokes about Argentinian wives, komodo dragons, mountain lions, “kill -9”, and GreenHab water. Everywhere we are afflicted with the sensory barrage of modern commerce, TV, advertising, multiple conversations going on at once—society in general. Our close-knit harmony, so integral that it was almost unnoticeable during the mission itself, is dissolving as we part ways and we are left flailing just a little in adapting to how other people work again. I cannot speak for the rest of the crew, but the magnitude of this effect surprises me. I guess even in two weeks, the psychological effects of extreme isolation and the essential interdependence of our small group have hit home.
It’s not clear when we’ll see each other again, in smaller groups or as a full crew. I may see Brian at the upcoming Lunar and Planetary Science Conference in Houston. Carla, who lives in Houston, will sadly be off vacationing in Bora Bora! (Well, sadly for me; I’m sure she will be having a wonderful time!) But wherever we may be, I think we will all hold a warm spot in our hearts for our accomplishments and our teamwork. We did it! We survived, and thrived, in our expedition to the Mars Desert Research Station. Thank you to everyone who supported and aided us in this challenge—and especial thanks to my crewmates, all of whom were absolutely top-notch.